 Skip to content
Skip to content 








DIY Humanoid Robotic Hand in Pakistan
9,500.00 ₨ – 14,500.00 ₨
Advance Payment only
Processing Time 3 days
for Assembly see Videos
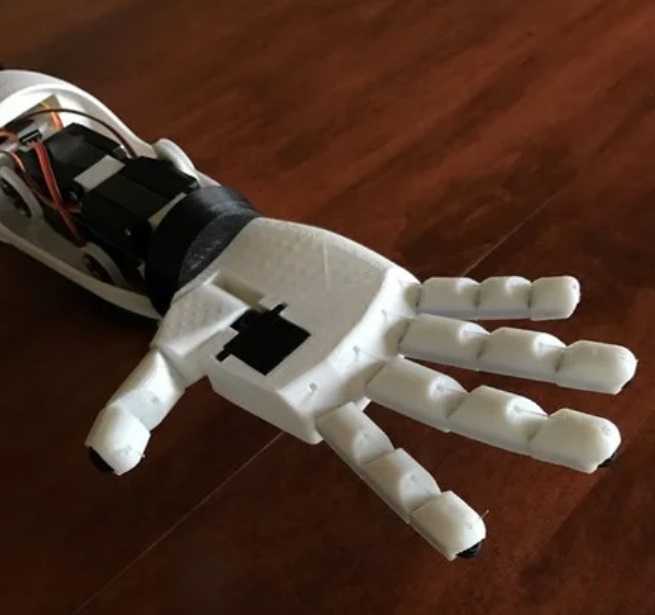
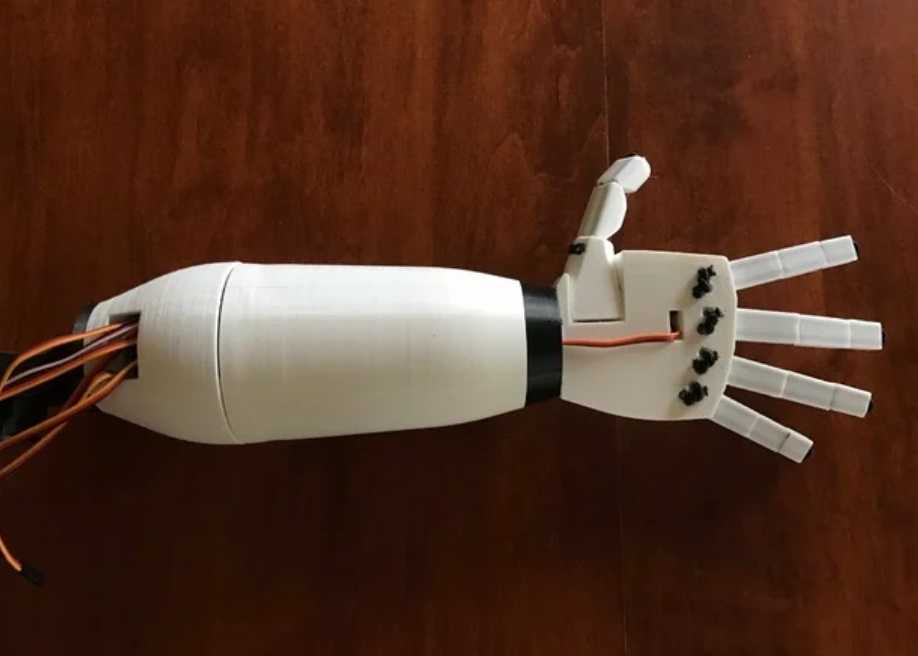
Humanoid Robotic Hand The hand files are part of a larger project which has taken around two years. The project is an entirely 3D printed humanoid robot similar to the inmove project but with many major differences in design. It features an improved gripping design and an opposable thumb. This is created to be incredibly inexpensive, simple to make, and reliable, I have put the arm through some rigorous stress testing, and it’s able to run for hours on end without a hitch. I will publish the rest of the arm designs in the near future. My current goal is to gain funding through sponsorship or donations to continue my research.
Assembly of the arm is very simple and forthright but I will post a video on how to assemble the arm very soon (the order in which you assemble is crucial).
Package include(Unassembled):
- All Robotic Parts
- mg90 Servo Motor.
- Mg996r x5 Motors include
Advance Payment only
Processing Time 3 days
Tools needed for assembly:
-Super Glue
-Plyers
-Screwdriver
-Exacto Knife or Scissors
Tools needed for assembly:
-Super Glue
-Plyers
-Screwdriver
-Exacto Knife or Scissors
Tools needed for assembly:
-Super Glue
-Plyers
-Screwdriver
-Exacto Knife or Scissors
CODING for Humanoid Robotic Hand:
My partner in this project who deals with all the programming just recently published all the files on how to control the arm with the LEAP on his gifthub page
https://github.com/tt-anderson
This code, in particular, is what took us many months to perfect so I sincerely hope you guys enjoy using it!
Related Products:
| Choose | With Servos, Without Servos |
|---|
Be the first to review “DIY Humanoid Robotic Hand in Pakistan”
Related products


Quadcopter & Parts
5030 Propeller for Racing Drones (5 inches) Optional in Different Colours



Quadcopter & Parts
DJI 920KV Brushless Motor CW/CCW for DJI Phantom 2 3 F450 F550 Quadcopter

Quadcopter & Parts
Emax Simonk 40A Brushless ESC Electronic Speed Controller UBEC 40A







Reviews
There are no reviews yet.